RAS Aerial
Realizing Autonomous Flight
Overview
Our goal is to create a functional hardware and software stack that achieves autonomous flight on a quadcopter. With the rising popularity of drones within the decade, we want to contribute to the engineering and knowledge of building multicopters and implementing an autonomous system. Our points of interest in RAS Aerial are utilizing CAD tools to design our structures, designing and constructing the necessary hardware/electronics system in order to fly, and utilizing the ROS environment along with mathematical techniques and algorithms to realize state estimation and controls.
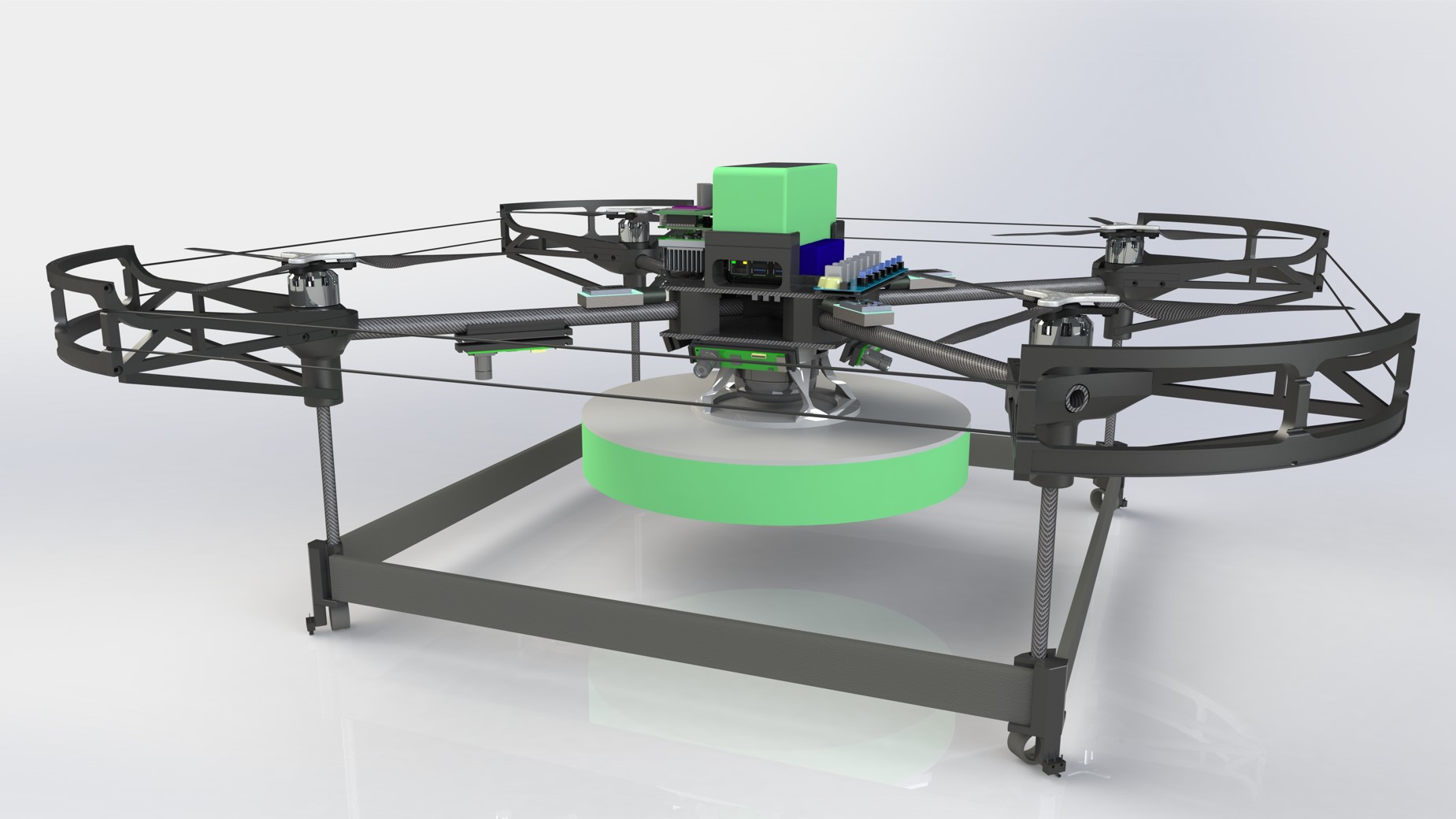
Rendering from our previous drone project, IARC.
Outline
The two main components of our goals are construction of the drone frame, system electronics, hardware and software tools, and lastly, simulation and networks.
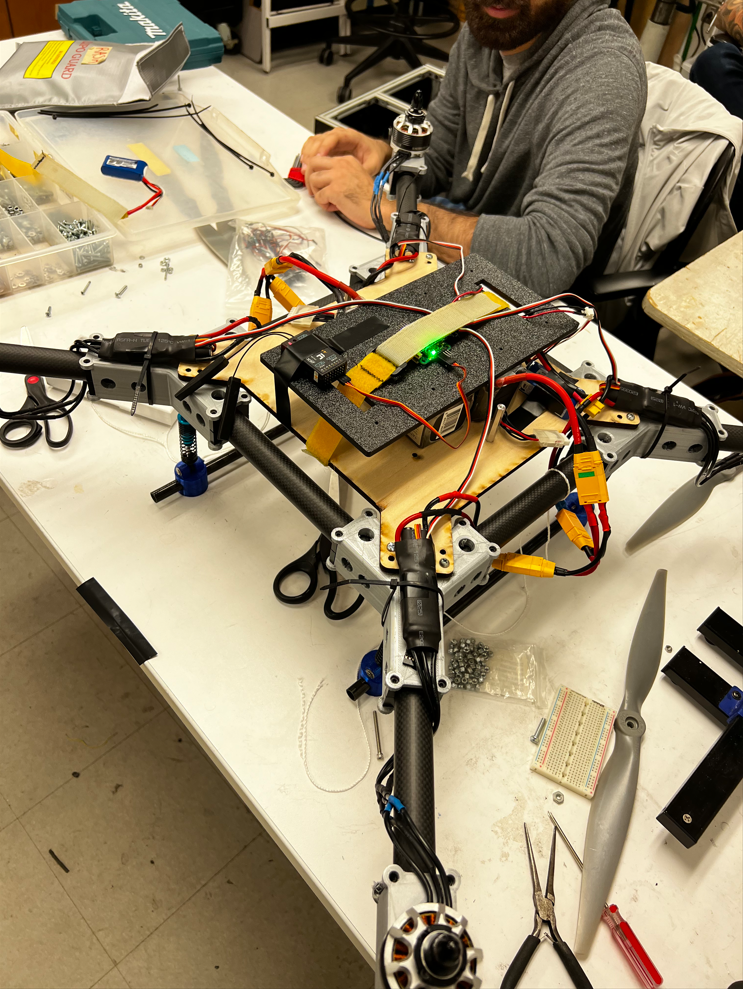
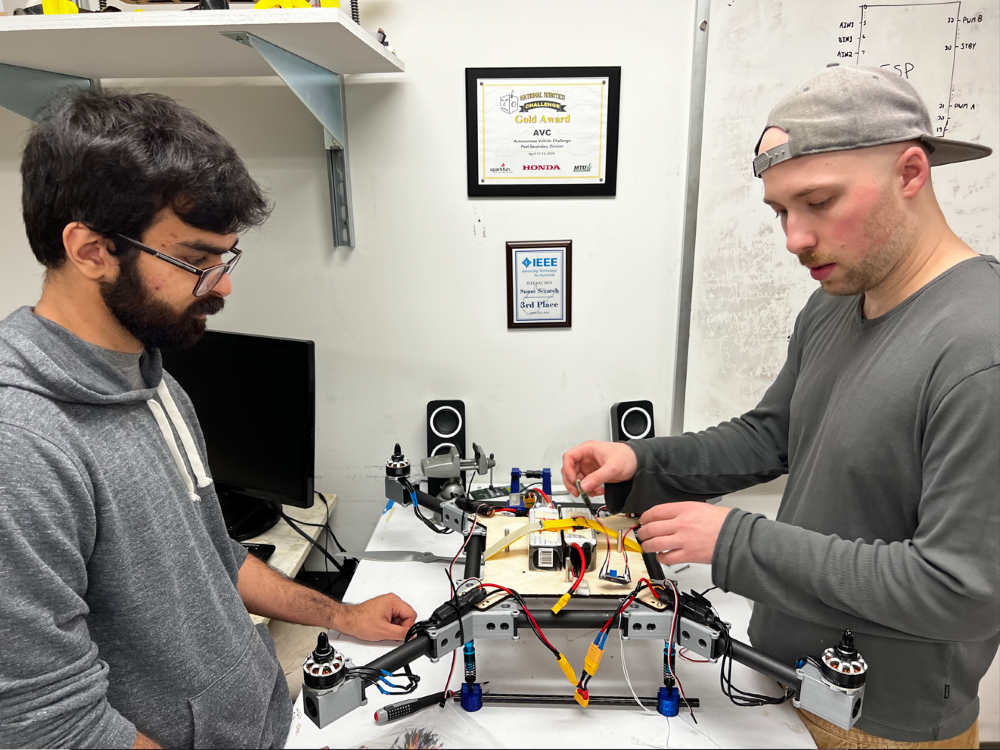
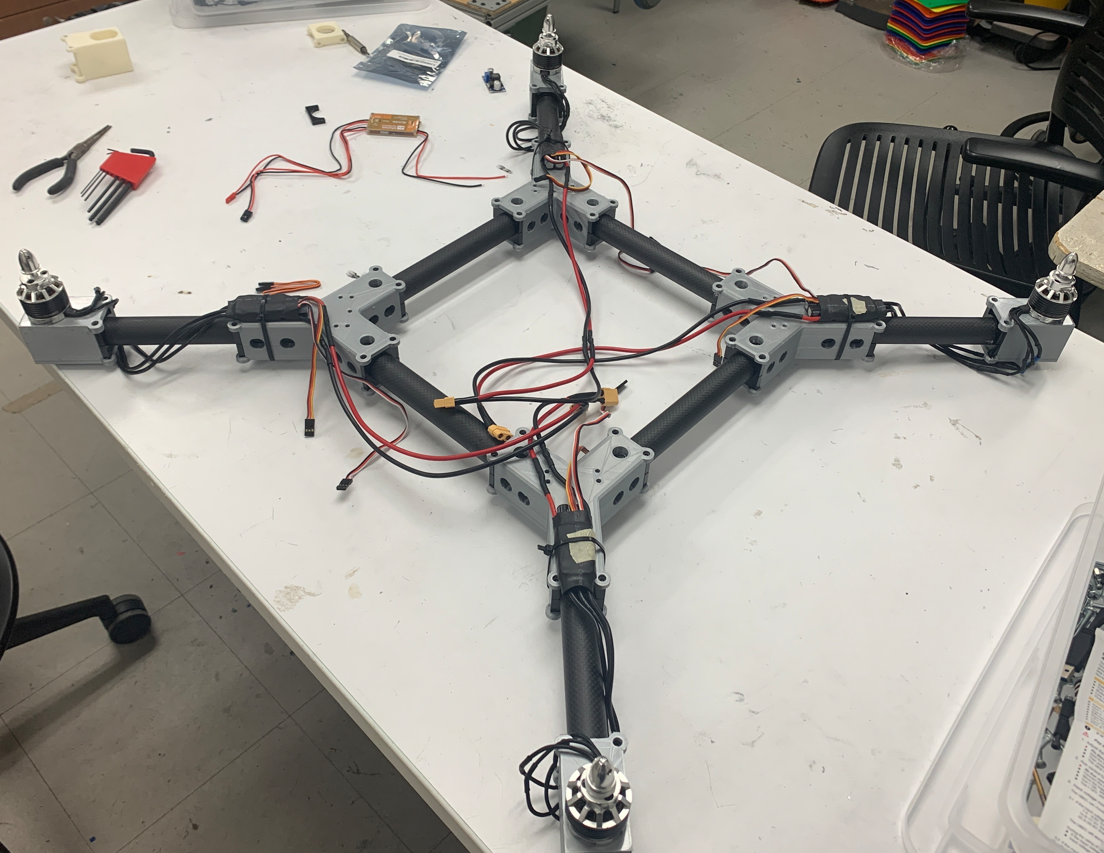
Structure & Hardware
The frame of our drone consists of carbon fiber tubes and 3D printed joints/motor mounts. Our in-shop 3D printer makes it easy to test our CAD designs and work through the engineering of our frame. The electronics we are using in our design are 3-phase motors and ESCs connected to a Pixhawk 4 flight controller which directly communicates with an RC receiver that has telemetry compatibility. Additionally, the flight controller also has direct communication to a NVIDIA Jetson TX2 which will drive the autonomous processing.
Software & Simulation
We plan to use well-known algorithms and filtering processes to implement state-estimation which feeds to a control unit designed to handle the thrust, pitch, roll and yaw movement of the drone. As this is implemented, we will test and simulate our software using the Gazebo/ROS environment and MavROS/MavLink when communicating with the Pixhawk 4. The PX4 open source software stack makes our testing/simulation easily migratable to our hardware for real flight testing since it models the communication and controls of the Pixhawk 4 flight controller.
How to Join
Just message us! No experience is necessary to join and students of all backgrounds are welcome. This includes (but is not limited to) computer engineering, mechanical engineering, computer science, electrical engineering. See our contact page for how to reach us.
Gallery