Projects
From full size cars to 1kg minibots to drones and more
Project Overview
If you would like to get involved, please head over to our contact page to get started! For project meeting times and to get in touch with us, feel free to shoot us an email or join our Discord!
Current Projects

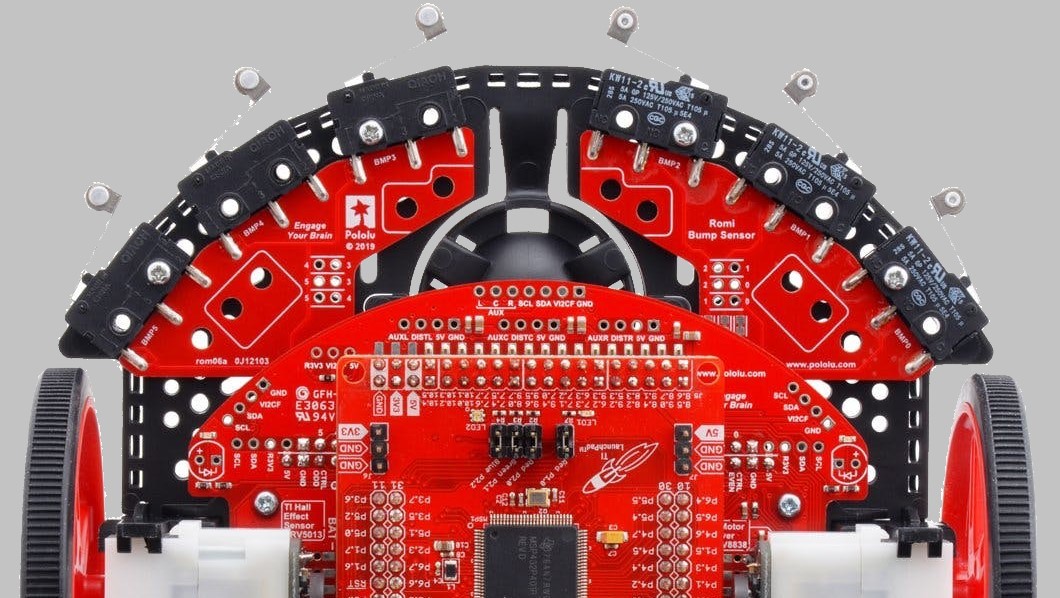
Micromouse
A small autonomous driving robot that has to solve a large floor maze as fast as possible.
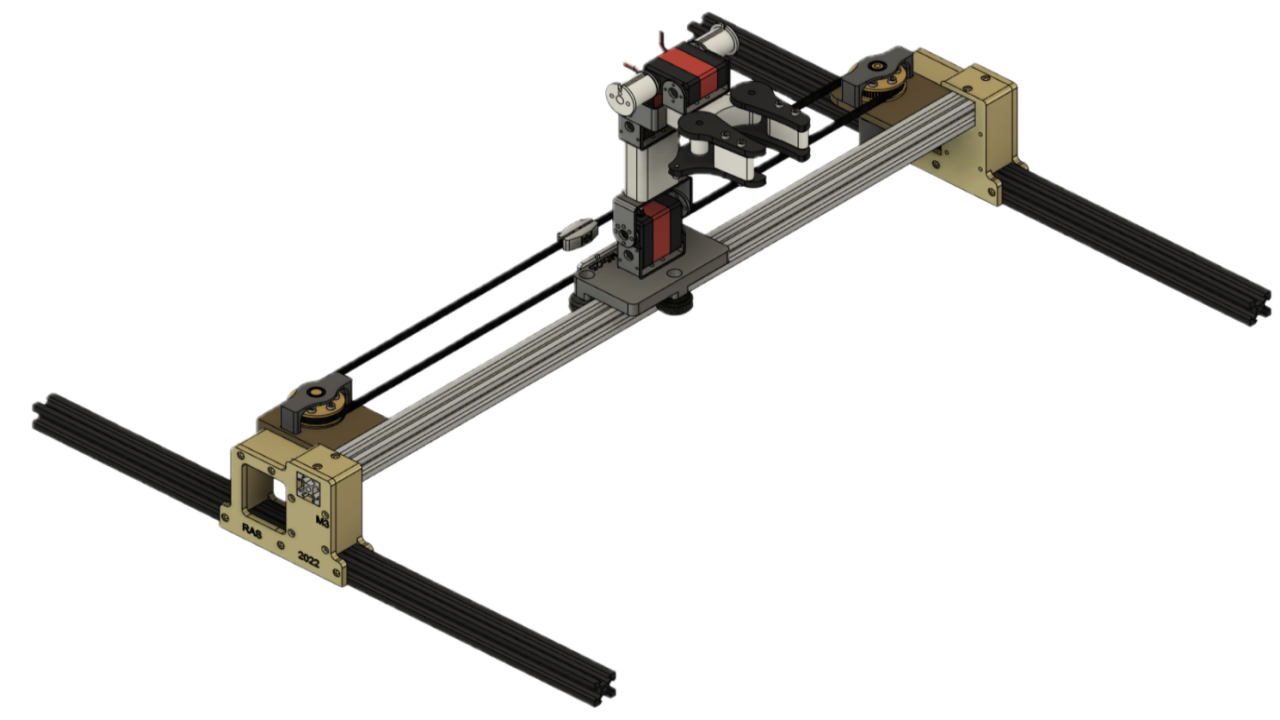
Robot Arms
Small scaled robotic arm that covers the basic functions in the design and development of industrial automation systems.
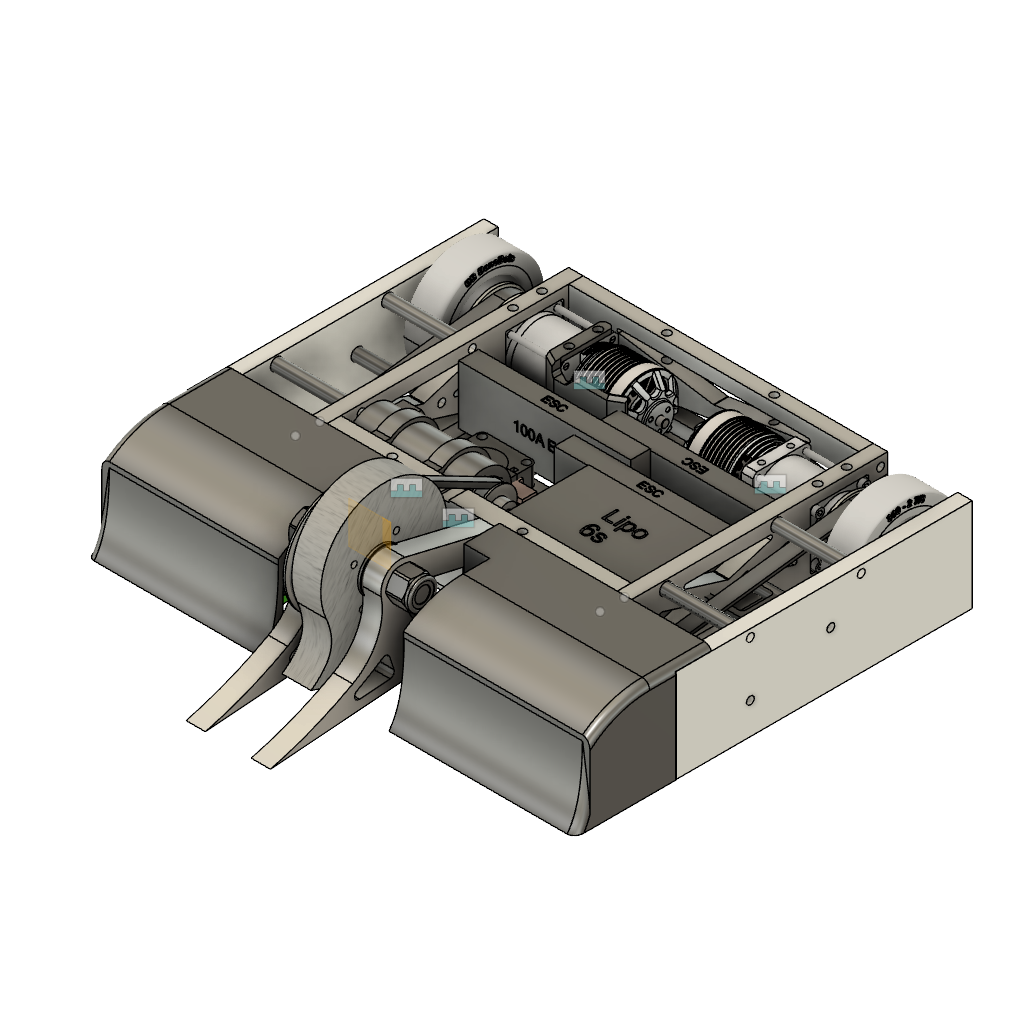
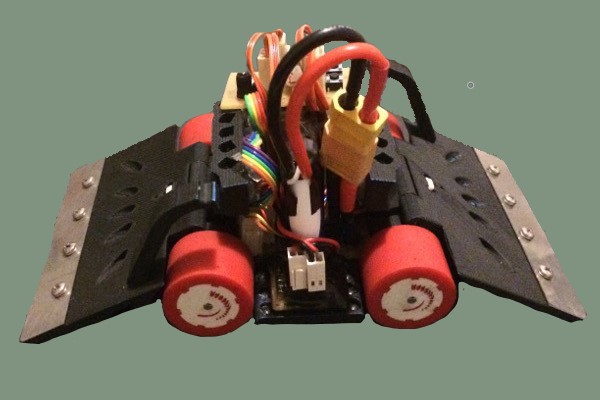
Battle Bots
Remote-controlled, weaponized robots whose sole goal is to absolutely dismantle their robot opponent.

Rover
Building a 1.2m^3 autonomous rover to maneuver over terrains that micmik the environment of Mars!
Past Projects

Indy Autonomous Challenge
Developing software stacks for full size, fully autonomous racecars.

F1Tenth
Developing a 1/10th scale autonomous car, building both the hardware and the software stack.
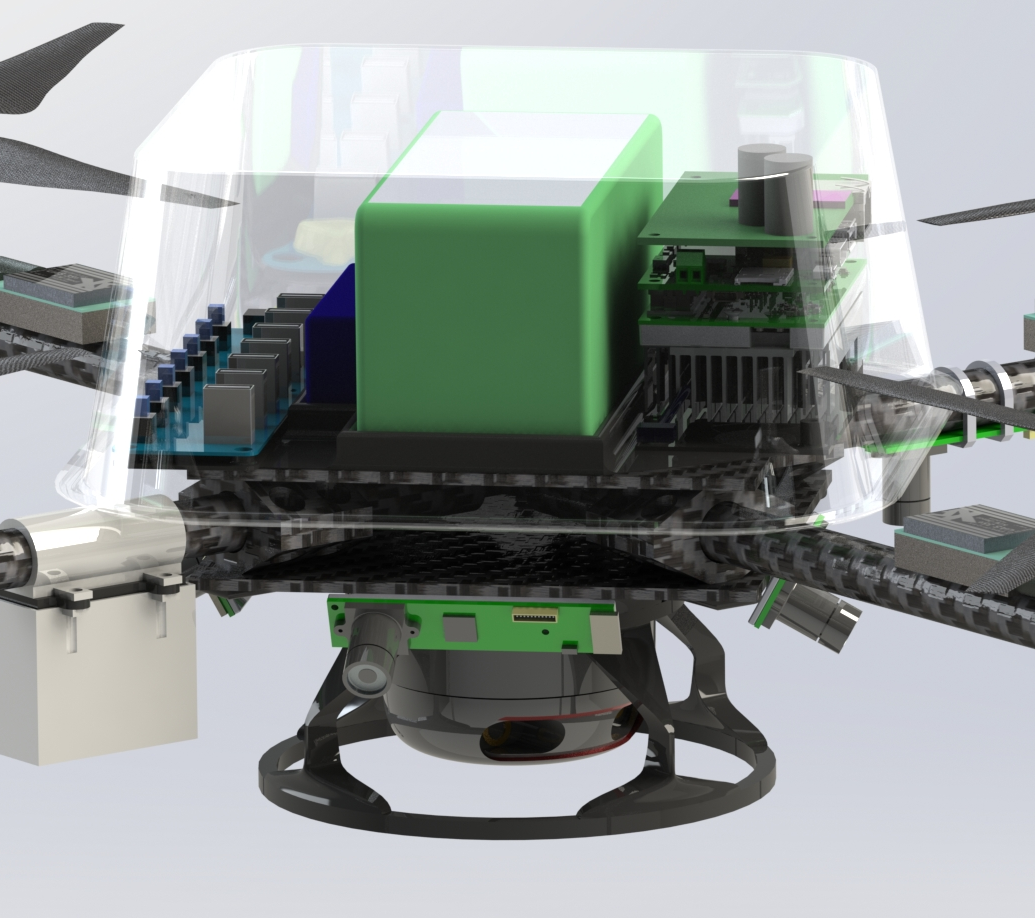
IARC Mission 7
The International Aerial Robotics Competition or IARC called for building a drone that is capable of interacting with moving ground robots.
Awards: Best System Design and Most Points Achieved (IARC 2017); Best System Design, Best Technical Paper, and Most Points Achieved (IARC 2018)
Robotics Design Projects
Small group, mini robotics projects aimed at helping students get started with and build a strong foundation in robotics.
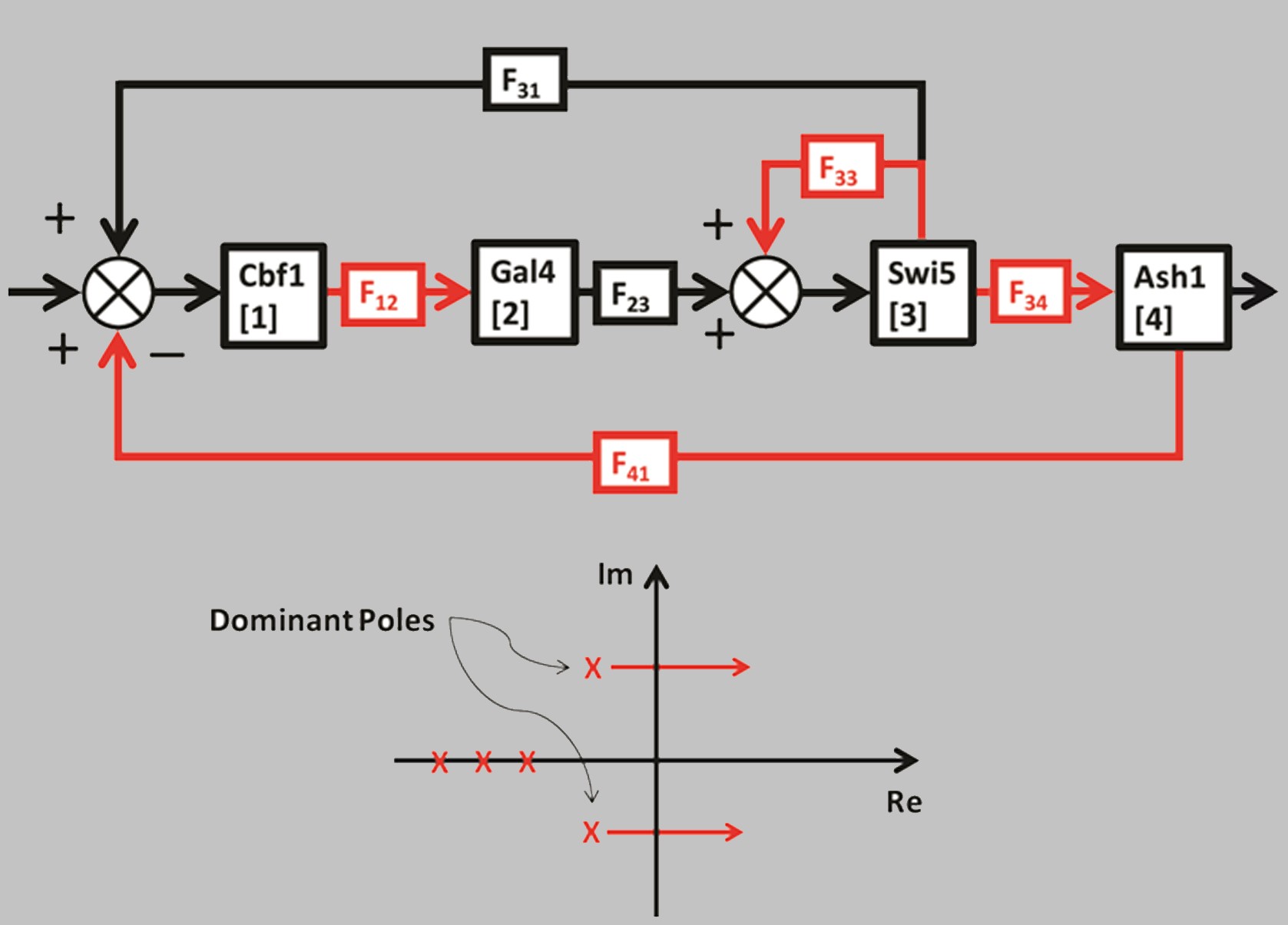
Investigation Into Motion Control for Robotics
An internal RAS project focused on motion control algorithms, with the end goal being to create a motion control library that can be used on a variety of robots.
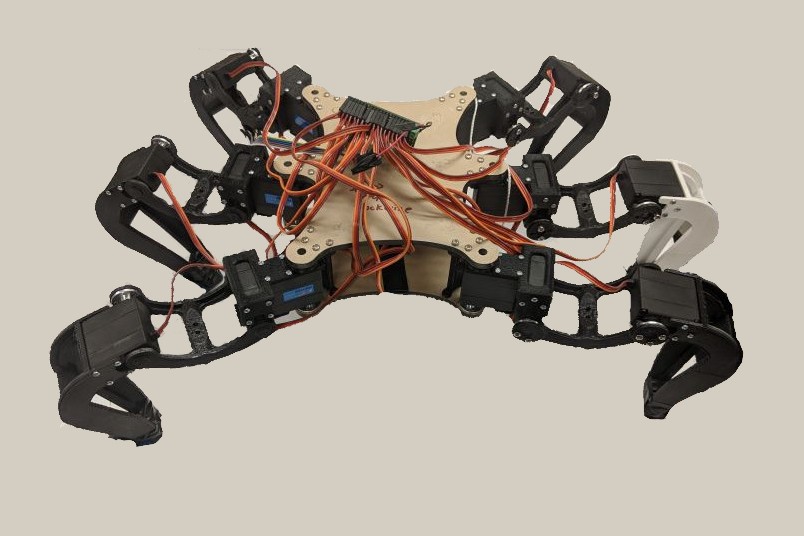
Scorpion
A scorpion robot (six-legged) that can mimic the motion of a real scorpion.
Mini Sumo
Small autonomous driving robot where the goal is to push the opposing robot outside of the ring.
Awards: 1st place prize in the 2016 IEEE SAC.
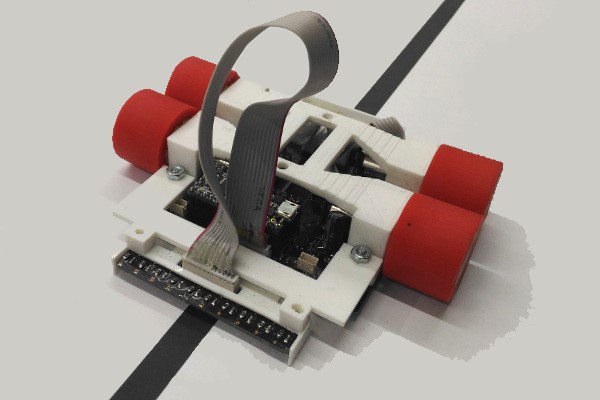
Line Follower
Line following robot where the goal is to complete the track as fast as possible.